
<ハードとソフト>
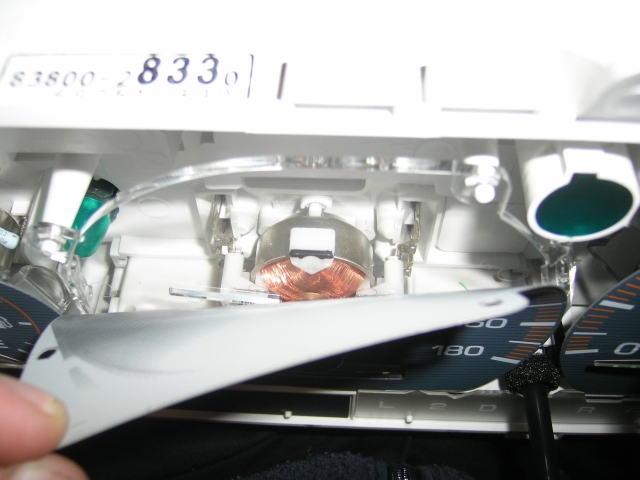
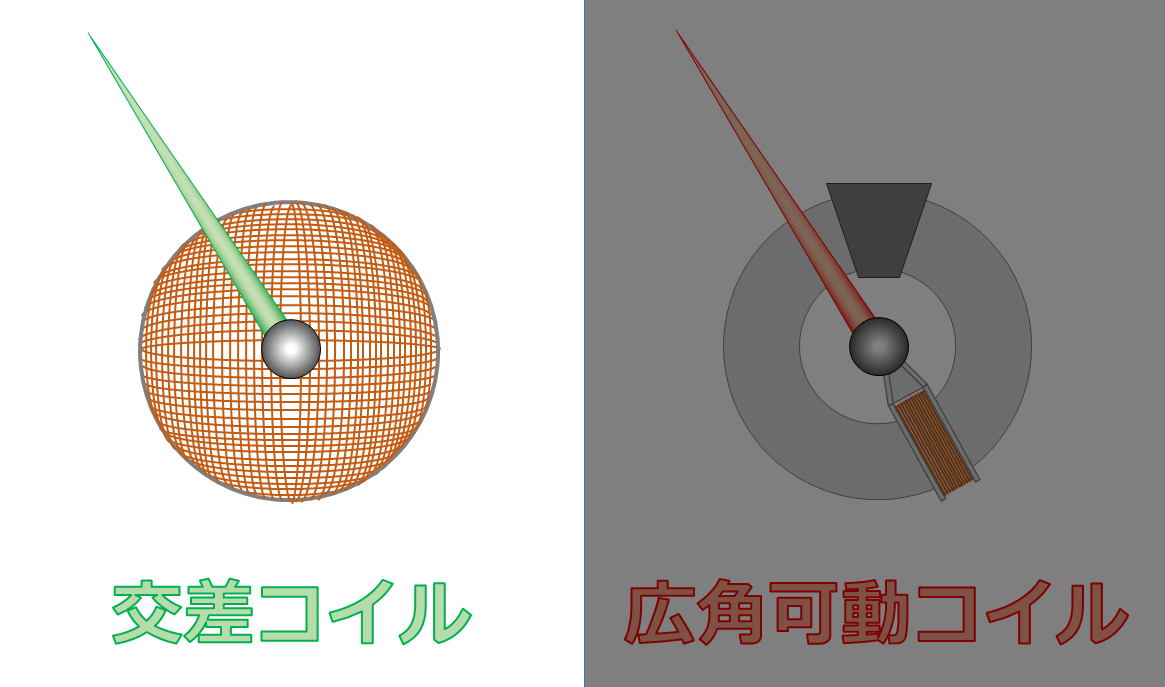
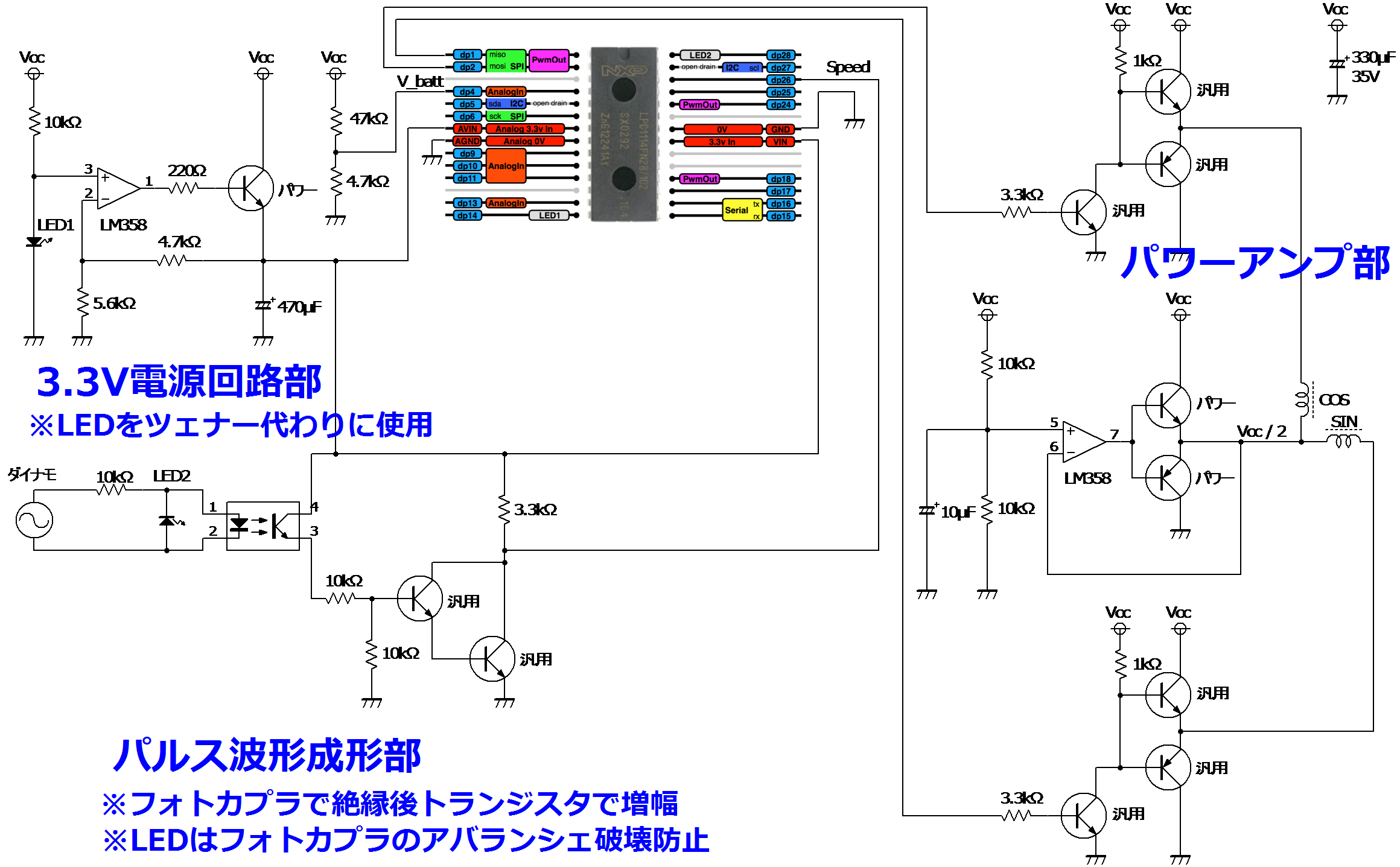
本回路は、ダイナモから電源をとるのみならず、ダイナモの出力周波数は速度に比例することに着目しダイナモを速度センサとしても用いています。そのため、センサ不要、乾電池不要となりまります。マイコンでは、周波数カウンタおよび交差コイルメータードライブの処理をしています。周波数を計測し、計測結果を車の交差コイルメーターを駆動するためのsin・cos成分に分解し、PWMで駆動します。
動画撮影時から改良を重ね、ドライブ回路や電源回路は大幅に変更されています。
 ソフトウエアは「直接計数式(ゲート方式)周波数カウンタ」を用いています。ゲート方式とは、一定時間に何回パルスが来るか数える方式です。(ちなみに周期をタイマーで測るモードはレシプロカル方式と言います。)
ソフトウエアは「直接計数式(ゲート方式)周波数カウンタ」を用いています。ゲート方式とは、一定時間に何回パルスが来るか数える方式です。(ちなみに周期をタイマーで測るモードはレシプロカル方式と言います。)LPC1114にはFPU(浮動小数点演算ユニット)が搭載されていないため、レシプロカル方式のアルゴリズムでは処理が追いつかず実用になりませんでした。
また、FPUがないため当然sin・cosの計算等にも時間がかかる為、フラグを立てて計算をする時と測定に専念する時に処理を分けています。
開発環境には mbed を使用しC言語で記述しています。
//LPC1114 チャリスピードメーター
//ゲート方式 一定間隔内のゼロクロスを数える
//平均化処理しないと針がふらつく
#include "mbed.h"
#define f_rad_keisuu 0.03 //パルス周波数からradへの変換係数 ハブダイナモ = 0.03? ブロックダイナモ=0.004
#define kakudo_max 4.4 //メーターの最大振り角度(rad)
#define sampling_time 0.1 //サンプリング周期(秒) 0.05だと処理落ち、0.15だとガクガク 0.1がいい感じ
//内蔵LED
DigitalOut myled1(dp14);
DigitalOut myled2(dp28);
//信号入力
InterruptIn speed_sensor(dp26); //スピードセンサーからの車速パルス入力
//制御出力
PwmOut sin_coil(dp1); //sinコイル出力
PwmOut cos_coil(dp2); //cosコイル出力
//サンプリングゲートタイマー設定
Ticker sampling; //サンプリング用タイマ割り込み
//グローバル変数
int pulse; //パルスをカウントする変数
int gate; //ゲートフラグ(0:計算中 1:計測中 2:計測準備完了)
int data[10] = {0,0,0,0,0,0,0,0,0,0};
//角度を受け取って交差コイルにPWM出力する関数。pwmoutは0~1のため、0.5を中心にする。
void kousa_coil_output(float kakudo)
{
myled2 = 0;
if(0 <= kakudo && kakudo <= kakudo_max) //範囲内ならば交差コイルドライブ
{
sin_coil = 0.5 + 0.5 * sin(kakudo);
cos_coil = 0.5 + 0.5 * cos(kakudo);
}
else //範囲外ならオーバーロードランプを付けメーターの更新をしない
{
myled2 = 1;
}
gate = 2; //振れ角の計算まで終わったら次の測定準備完了
}
void pulse_counter(void)
{
pulse ++; //一回呼ばれる毎にパルス数変数をカウントアップするだけ
}
//パルス数からスピードを計算する関数(タイマ割り込みで呼ばれる)
void speed_calc(void)
{
static float output = 0.0;
if(gate == 1){
gate = 0;
data[0] = data[1];
data[1] = data[2];
data[2] = data[3];
data[3] = data[4];
data[4] = data[5];
data[5] = data[6];
data[6] = data[7];
data[7] = data[8];
data[8] = data[9];
data[9] = pulse;
output = (data[0]+data[1]+data[2]+data[3]+data[4]+data[5]+data[6]+data[7]+data[8]+data[9]) * f_rad_keisuu;
//10回平均後に係数をかけてメーターの振れ角度に計算
kousa_coil_output(output);//交差コイルドライブ関数に角度(rad)を出力
}
if(gate == 2)
{
pulse = 0;
gate = 1;
}
}
int main() {
sin_coil.period_us(1000.0);//pwmは1kHz
cos_coil.period_us(1000.0);//pwmは1kHz
speed_sensor.fall(&pulse_counter);//立下りピン変化割り込みでパルスカウンターを呼ぶように設定
sampling.attach(&speed_calc , sampling_time);//タイマ割り込みで速度計算関数を呼ぶ
myled1 = 1;//ledをつけて準備完了
gate = 2;//測定準備モードにセット
while(1) {
}
}
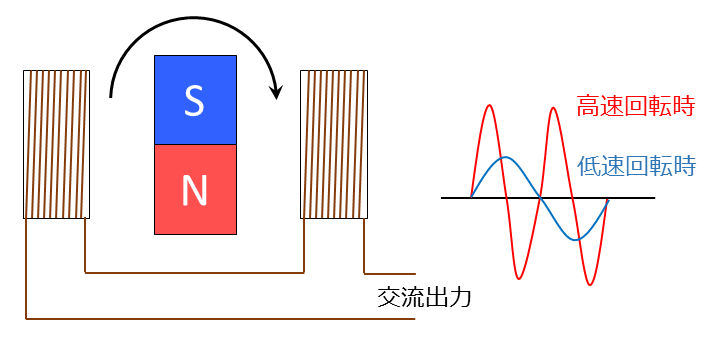 自転車のライト用ダイナモは、発電機の世界では「永久磁石式交流同期発電機」という仲間に入ります。これは、永久磁石をコイルの前で回転させて、コイルに誘導起電力を起こす発電機です。コイルの前をS極、N極が交互に通過しますが、整流子を持たないため出力は交流となります。
自転車のライト用ダイナモは、発電機の世界では「永久磁石式交流同期発電機」という仲間に入ります。これは、永久磁石をコイルの前で回転させて、コイルに誘導起電力を起こす発電機です。コイルの前をS極、N極が交互に通過しますが、整流子を持たないため出力は交流となります。